3月23日,日本小野市某测试场内,一辆无人挖掘机正在灵活行走,并相继完成了支撑回旋、定点回填、挖机装车等一系列精准动作,而它的全部动作指令均来自北京的远程操控平台。这是拓疆者为日本客户远程改装的挖掘机(跨国改装日本挖掘机 看拓疆者如何“搞事”!),首次在基于4G公网条件下实现的跨国远程控制作业。
当天,远程控制的挖机不仅在测试场内完成了诸多精细动作,更与日本的挖机手上演了一场挖机“绕S弯道”技艺大PK。结果显示,远程操控的挖机以8分09秒的战绩,战胜了日本挖机手亲自操作的挖机(8分49秒),不仅彰显了咱们挖机手的技术高超,更说明了拓疆者远程智控系统的成熟。
司机在北京操作着摇杆,画面中在日本的挖掘机就立即移动起来。听起来平平无奇的事实背后,却是拓疆者为完成此次测试所作出的诸多技术攻关。尤其是在本次跨国远程操作中,对操作手行为信息采集的准确传输和车端信息的及时回传具有严格要求,“远距”和“延时”便是两大关键技术难点。
北京和日本兵库县小野市之间相距1700多公里,且由于中国互联网的特殊性,导致了跨国远程遥控挖机的网路信号问题难度增大,尤其是日本的5G技术推广比国内滞后,此次测试只能在4G网络条件下进行,更增加了信息传送的不确定性。
为解决远距及4G网络传输问题,拓疆者与日本客户制定了一套远程网络信号传送方案,信号从日本传出后,通过信号中继站,与北京的4G网络对接,确保了音视频信号同步传输、控制信号远程传输的高速度及低延时性。
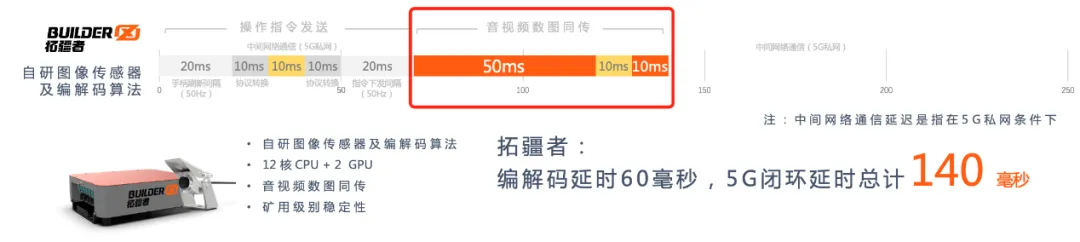
我们知道,远程遥控挖机作业过程的信令传输闭环为:操作指令发送→摄像头数据读取及视频编码压缩→数据网络传输→视频解码及显示。其中,每个节点耗费的时间都是影响系统闭环延迟的重要因素。不难发现,网络条件虽对闭环延时有一定影响,但却不是影响最大的环节,摄像头数据的编解码才是影响闭环延时更为关键的因素。
在拓疆者看来,降低远程遥控系统闭环延时,优化操作体验性,确保远程遥控实用性,只依赖网络基础建设的优化是远远不够的。毕竟远程设备在不同场地作业,所面临的网络环境差异很大。系统闭环延时的优化,还应着眼于传感器,即各类摄像头的编解码延迟降低中。我们从摄像头硬件设计做起,不断优化编解码算法参数,可将摄像头数据读取及视频编码压缩、视频解码及显示两部分延时降低至60毫秒。而美国硅谷顶尖的自动驾驶公司Nuro Inc.的编解码延时也仅为55毫秒,由此可见,拓疆者已在该领域已经达到世界领先水平。
 与常见网络摄像头方案严重依赖5G网络不同,拓疆者通过上述技术的突破,实现了利用4G公网,完成北京 – 日本1700公里超远距操控作业,且系统闭环延迟低至170毫秒。
170毫秒是什么概念?医学资料显示,人眼眨动一下的时间大约是200毫秒,也就是说,常规情况下人类无法感知170毫秒的延时。这让操作者遥控挖机的体验与实际上机操作设备的体验更加接近。
此前,行业中不乏通过5G专线遥控挖掘机的事例。那么此次拓疆者4G公网条件下,实现对挖机的跨国遥控操作有何优势及意义?
传统5G挖机对网络的依赖性较大,导致客户实际使用过程,部署专线网络的成本较高,尤其是涉及跨国作业。
拓疆者仅仅依靠中日两端设备插入手机4G SIM卡,就实现了远程操控。该方式一是相较于只能使用专线网络,拓疆者系统适应环境更为广泛,部署也更加灵活,只要有4G的地方就可以实现远程智控;二是公网的成本更低,相较于专线成本,公网传输信号的成本下降了整整一个数量级。
上述优势也使得工程机械远程操控系统,能够更广泛的应用于行业各类场景中,尤其是跨国作业项目,或大规模集群应用。对行业而言,这将进一步丰富远程无人驾驶工程机械的实际应用场景。
本次改装测试赢得了日本客户的高度评价:“这次把北京和日本两方的工作人员连接在一起,共同为远程遥控挖机作业的工作而努力的过程虽然辛苦,但是当看到眼前这台挖机通过北京的指令动起来了,大家都很激动。尤其是日本建筑业现如今面临着用工荒等现状,我觉得远程遥控挖机作业今后一定能在日本得到更多的普及和推广,大家一起加油吧!”
一名日本客户代表,更是发来了祝贺视频,庆祝本次测试圆满成功。
通过北京的操作平台,远程遥控在日本的挖掘机是什么体验?
“即使是如此远距离的操控,我也能很好的控制挖机的一些精细动作,整个遥控操作过程非常流畅,日本挖机的动作和我在北京看到的图像几乎是同步的,完全没有卡顿和延迟的现象。我感觉,这就跟我操作真实的挖机作业是一样的。”
当今社会,人口老龄化步伐加快,机器代替人工已是大势所趋。拓疆者为日本客户远程改装挖机并测试成功事件,进一步丰富了远程无人驾驶挖掘机的实际应用场景!
未来,拓疆者还将不断优化提升技术水平,为工程机械更多应用场景打造专属的智能化解决方案,在提升作为工程机械领域技术领先企业地位的同时,助力行业整体智能化技术水平的升级!
与常见网络摄像头方案严重依赖5G网络不同,拓疆者通过上述技术的突破,实现了利用4G公网,完成北京 – 日本1700公里超远距操控作业,且系统闭环延迟低至170毫秒。
170毫秒是什么概念?医学资料显示,人眼眨动一下的时间大约是200毫秒,也就是说,常规情况下人类无法感知170毫秒的延时。这让操作者遥控挖机的体验与实际上机操作设备的体验更加接近。
此前,行业中不乏通过5G专线遥控挖掘机的事例。那么此次拓疆者4G公网条件下,实现对挖机的跨国遥控操作有何优势及意义?
传统5G挖机对网络的依赖性较大,导致客户实际使用过程,部署专线网络的成本较高,尤其是涉及跨国作业。
拓疆者仅仅依靠中日两端设备插入手机4G SIM卡,就实现了远程操控。该方式一是相较于只能使用专线网络,拓疆者系统适应环境更为广泛,部署也更加灵活,只要有4G的地方就可以实现远程智控;二是公网的成本更低,相较于专线成本,公网传输信号的成本下降了整整一个数量级。
上述优势也使得工程机械远程操控系统,能够更广泛的应用于行业各类场景中,尤其是跨国作业项目,或大规模集群应用。对行业而言,这将进一步丰富远程无人驾驶工程机械的实际应用场景。
本次改装测试赢得了日本客户的高度评价:“这次把北京和日本两方的工作人员连接在一起,共同为远程遥控挖机作业的工作而努力的过程虽然辛苦,但是当看到眼前这台挖机通过北京的指令动起来了,大家都很激动。尤其是日本建筑业现如今面临着用工荒等现状,我觉得远程遥控挖机作业今后一定能在日本得到更多的普及和推广,大家一起加油吧!”
一名日本客户代表,更是发来了祝贺视频,庆祝本次测试圆满成功。
通过北京的操作平台,远程遥控在日本的挖掘机是什么体验?
“即使是如此远距离的操控,我也能很好的控制挖机的一些精细动作,整个遥控操作过程非常流畅,日本挖机的动作和我在北京看到的图像几乎是同步的,完全没有卡顿和延迟的现象。我感觉,这就跟我操作真实的挖机作业是一样的。”
当今社会,人口老龄化步伐加快,机器代替人工已是大势所趋。拓疆者为日本客户远程改装挖机并测试成功事件,进一步丰富了远程无人驾驶挖掘机的实际应用场景!
未来,拓疆者还将不断优化提升技术水平,为工程机械更多应用场景打造专属的智能化解决方案,在提升作为工程机械领域技术领先企业地位的同时,助力行业整体智能化技术水平的升级!